GPIO
PUBLISHED
GPIO (General-Purpose Input/Output) is a programmable interface for reading the state of binary input peripherals, such as a switch, and controlling the state of binary output peripherals, such as a LED.
GPIO sets a direction for the data transfer. It can also detect an interrupt signaled by a level transition: either a falling edge (high to low) or a rising edge (low to high). To detect the interrupt signal you want, set the appropriate edge mode.
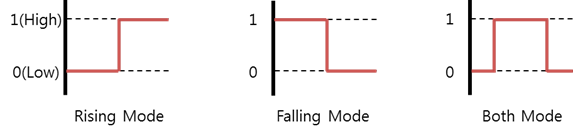
GPIO offers the following edge modes:
- Rising mode detects data changes from low to high.
- Falling mode detects data changes from high to low.
Figure: GPIO edge modes
Opening and Closing a Handle
To open and close a handle:
- To open a GPIO handle, use the
peripheral_gpio_open()function:int pin = 26; /* Raspberry Pi 3 : GPIO26 */ peripheral_gpio_h gpio_h; peripheral_gpio_open(pin, &gpio_h);
The
pinparameter required for this function must be set according to the following tables.Table: Raspberry Pi 3
Pin name Pin (parameter 1) Pin name Pin (parameter 1) GPIO4 4 GPIO5 5 GPIO6 6 GPIO12 12 GPIO13 13 GPIO16 16 GPIO17 17 GPIO18 18 GPIO19 19 GPIO20 20 GPIO21 21 GPIO22 22 GPIO23 23 GPIO24 24 GPIO25 25 GPIO26 26 GPIO27 27 – – Note For more information on the pin names and locations, see Supported Protocols. - To close a GPIO handle that is no longer used, use the
peripheral_gpio_close()function:peripheral_gpio_close(gpio_h);
Setting the Data Direction
To set the data transfer direction, use the peripheral_gpio_set_direction() function with 1 of the following direction types:
PERIPHERAL_GPIO_DIRECTION_IN: Input mode to receive data from a binary output peripheral.PERIPHERAL_GPIO_DIRECTION_OUT_INITIALLY_HIGH: Output mode to send data to a binary output peripheral. This value initializes the output peripheral state as high.PERIPHERAL_GPIO_DIRECTION_OUT_INITIALLY_LOW: Output mode to send data to a binary output peripheral. This value initializes the output peripheral state as low.
peripheral_gpio_set_direction(gpio_h, PERIPHERAL_GPIO_DIRECTION_OUT_INITIALLY_LOW);
PERIPHERAL_GPIO_DIRECTION_OUT_INITIALLY_HIGH or PERIPHERAL_GPIO_DIRECTION_OUT_INITIALLY_LOW, the edge mode must be set to PERIPHERAL_GPIO_EDGE_NONE.Setting the Edge Mode
To set the edge mode, use the peripheral_gpio_set_edge_mode() function with 1 of the following edge mode types:
PERIPHERAL_GPIO_EDGE_NONE: No edge mode.PERIPHERAL_GPIO_EDGE_RISING: Interrupted at a rising edge (low to high).PERIPHERAL_GPIO_EDGE_FALLING: Interrupted at a falling edge (high to low).PERIPHERAL_GPIO_EDGE_BOTH: Interrupted at both rising and falling edges.
peripheral_gpio_set_edge_mode(gpio_h, PERIPHERAL_GPIO_EDGE_RISING);
PERIPHERAL_GPIO_EDGE_RISING, PERIPHERAL_GPIO_EDGE_FALLING, or PERIPHERAL_GPIO_EDGE_BOTH, the data direction must be set to the PERIPHERAL_GPIO_DIRECTION_IN.Setting the Interrupted Callback
The interrupted callback is called when the GPIO state changes, based on the selected edge mode.
The interrupted callback is unset when the peripheral_gpio_unset_interrupted_cb() function is called or when the callback receives an error value other than PERIPHERAL_ERROR_NONE.
To implement the interrupted callback:
- Define the interrupted callback content.
static void interrupted_cb(peripheral_gpio_h gpio_h, peripheral_error_e error, void *user_data) { /* Code you want to run when the interrupt occurs */ } - Set the callback with the
peripheral_gpio_set_interrupted_cb()function:peripheral_gpio_set_interrupted_cb(gpio_h, interrupted_cb, NULL);
- When no longer needed, unset the interrupt callback with the
peripheral_gpio_unset_interrupted_cb()function:peripheral_gpio_unset_interrupted_cb(gpio_h);
Reading and Writing Binary Data
To read and write binary data:
- To read binary data from a peripheral, use the
peripheral_gpio_read()function:uint32_t value; peripheral_gpio_read(gpio_h, &value);
- To write binary data to a peripheral, use the
peripheral_gpio_write()function:uint32_t value = 1; peripheral_gpio_write(gpio_h, value);
PERIPHERAL_GPIO_DIRECTION_OUT_INITIALLY_HIGH or PERIPHERAL_GPIO_DIRECTION_OUT_INITIALLY_LOW.Was this document helpful?
We value your feedback. Please let us know what you think.